















M505滑動自平衡偏置倒立擺

名稱:其他儀器與工具
品牌:
型號:
簡介:M505滑動自平衡偏置倒立擺的設計形象展示了閉環控制的必要性和有效性。與傳統的車載倒立擺不同,該倒立擺是通過使得一個受重力作用影響的水平桿達到平衡來控制垂直擺桿。該系統的零極點全部位于右半平面,且具有運動和重力耦合非線性。通過調節配重塊質量...



申請服務
- 產品介紹
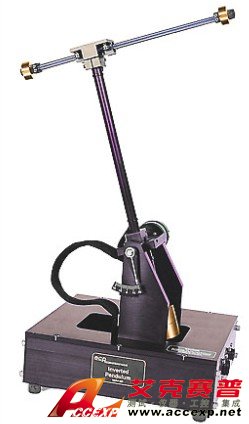
M505滑動自平衡偏置倒立擺的設計形象展示了閉環控制的必要性和有效性。與傳統的車載倒立擺不同,該倒立擺是通過使得一個受重力作用影響的水平桿達到平衡來控制垂直擺桿。該系統的零極點全部位于右半平面,且具有運動和重力耦合非線性。通過調節配重塊質量,改變系統特征根,從而可以實現從相對簡單到理論上不可能的控制問題。
 M505滑動自平衡偏置倒立擺詳解:
M505滑動自平衡偏置倒立擺詳解:
該滑動自平衡偏置倒立擺的設計形象展示了閉環控制的必要性和有效性。與傳統的車載倒立擺不同,該倒立擺是通過使得一個受重力作用影響的水平桿達到平衡來控制垂直擺桿。該系統的零極點全部位于右半平面,且具有運動和重力耦合非線性。通過調節配重塊質量,改變系統特征根,從而可以實現從相對簡單到理論上不可能的控制問題。
該系統的機械結構包括可拆除/可調節的力矩臂,在水平桿和垂直桿上進行配重,以實現系統動態的快速調節。在連接處具有直線和旋轉球形軸承,實現低摩擦和動態性能一致。
M505滑動自平衡偏置倒立擺詳解:該滑動自平衡偏置倒立擺的設計形象展示了閉環控制的必要性和有效性。與傳統的車載倒立擺不同,該倒立擺是通過使得一個受重力作用影響的水平桿達到平衡來控制垂直擺桿。該系統的零極點全部位于右半平面,且具有運動和重力耦合非線性。通過調節配重塊質量,改變系統特征根,從而可以實現從相對簡單到理論上不可能的控制問題。
該系統的機械結構包括可拆除/可調節的力矩臂,在水平桿和垂直桿上進行配重,以實現系統動態的快速調節。在連接處具有直線和旋轉球形軸承,實現低摩擦和動態性能一致。














